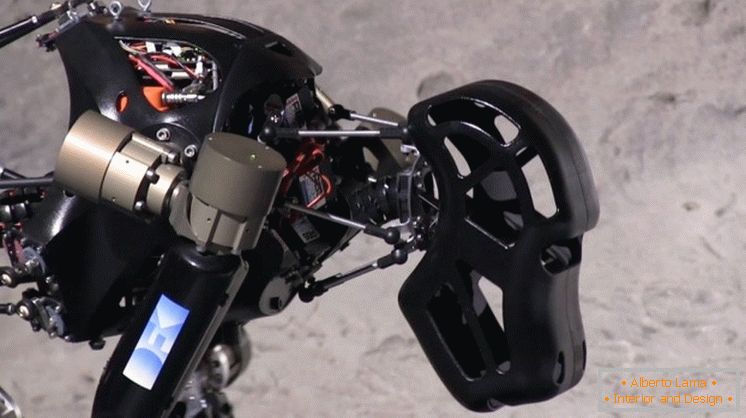
Niemieckie Centrum Badań Sztucznej Inteligencji (DFKI) i Uniwersytet w Bremie pracują nad symulowanym robotem iStruct Demonstrator, który jest klasyfikowany jako "robot kosmiczny". Teraz mechaniczne małpy przechodzą testy na chodzenie i równowagę w warunkach zbliżonych do reliefu księżyca.

Badanie niebezpiecznych powierzchni księżycowych wymaga użycia różnych form ruchu, a badacze z DFKI badają ich możliwości (w tym kombinację nóg, kół i gąsienic). Roboty przypominające małpy mają pewne zalety w porównaniu z kołami, czteropunktowa podpora pozwala stworzyć bardziej stabilną pozycję podczas pokonywania przeszkód lub pagórkowatego terenu. Robot może utrzymać równowagę na tylnych nogach, aby zwolnić przednie kończyny, aby wykonać jakąkolwiek czynność.

Z nowymi międzynarodowymi interesami w misji księżycowej istnieje możliwość, że iStruct (lub jeden z jego potomków) będzie mógł odwiedzić księżyc. Kolonizacja Księżyca przez roboty rozpocznie się od rozwoju, który może rozwijać się i rozsądnie reagować w każdej obecnej sytuacji, w związku z tym celem projektu jest zbudowanie "zaawansowanej sztucznej inteligencji" i systemu robotycznego, który może się uczyć i nawigować.
Robot ma przegubowy grzbiet łączący tułów i miednicę, zapewniający większą elastyczność, a także czujnik obciążenia stopy i kostki, reagujący w kontakcie z podłożem.
Inne funkcje obejmują:
- 43 niezależne silniki;
- Sześć dodatkowych czujników FSR na otwartych częściach używanych do wykrywania przeszkód;
- 6-osiowy czujnik momentu obrotowego;
- Cyfrowy 3-osiowy akcelerometr, aby dostrzec orientację stopy w przestrzeni;
- Dwa czujniki temperatury do kompensacji zmian temperatury w elektronice;
- Cyfrowy czujnik magnetyczny do kontroli kątowej każdej ruchomej osi stopy i stawu skokowego;
Większość robotów zawiera już wiele z tych czujników, ale przegubowy kręgosłup iStruct (który może działać jako 6-osiowy przetwornik momentu) jest rzadkością dla robotów lokomotorycznych, które pomagają poruszać się na czworakach. Czujniki w stopie i stawach skokowych pozwolą mu utrzymać równowagę na nachylonej powierzchni.
W 2008 i 2009 roku inżynier-absolwent Daniel Kuhn pracował nad podobnym robotem. Mała małpa, która była zdolna do prostego chodzenia na czworakach. Po tym projekcie rozpoczął pracę nad iStruct, który ma wiele istotnych aktualizacji. Jest to znacznie większa waga, 18 kg (40 funtów) i wymiary 66 x 43 x 75 cm (26 x 17 x 29 cali), a także zawiera 26 stopni swobody i jest zasilana przez różne silniki elektryczne. Projekt powinien zakończyć się w sierpniu tego roku.
Możesz zobaczyć, jak używa intelektualnych stóp i kostek podczas chodzenia i utrzymywania równowagi w filmie poniżej. Jest to mały krok dla robota-małpy, ale potencjalnie ogromny krok dla wszystkich robotów o podobnym designie.
Chodzić
Równoważenie
Galeria zdjęć Razem | 14 zdjęć